




Offres spéciales servomoteur 400w 600w 750w 1000w servomoteur 17bit encodeur absolu AC110V220V 1.27Nm-3.8Nm 543ozin pour graveur CNC
335,97 €
✓ En stock — 16640 disponibles
Voir mon panier 0
🚚 Livraison gratuite —
livré en 5 jours environ
Expédié avec suivi de colis inclus.
En cas de retard ou de problème, nous vous remboursons intégralement.
🇫🇷 Vendeur français
💯 Remboursement garanti
🔒 Paiement sécurisé
Mis à jour : 03/03/2026
Description du produit
Youtube :https://www.youtube.com/watch?v=Yf99H8xPOcw Apprenez à utiliser le servomoteur série C30 T3D
Introduction
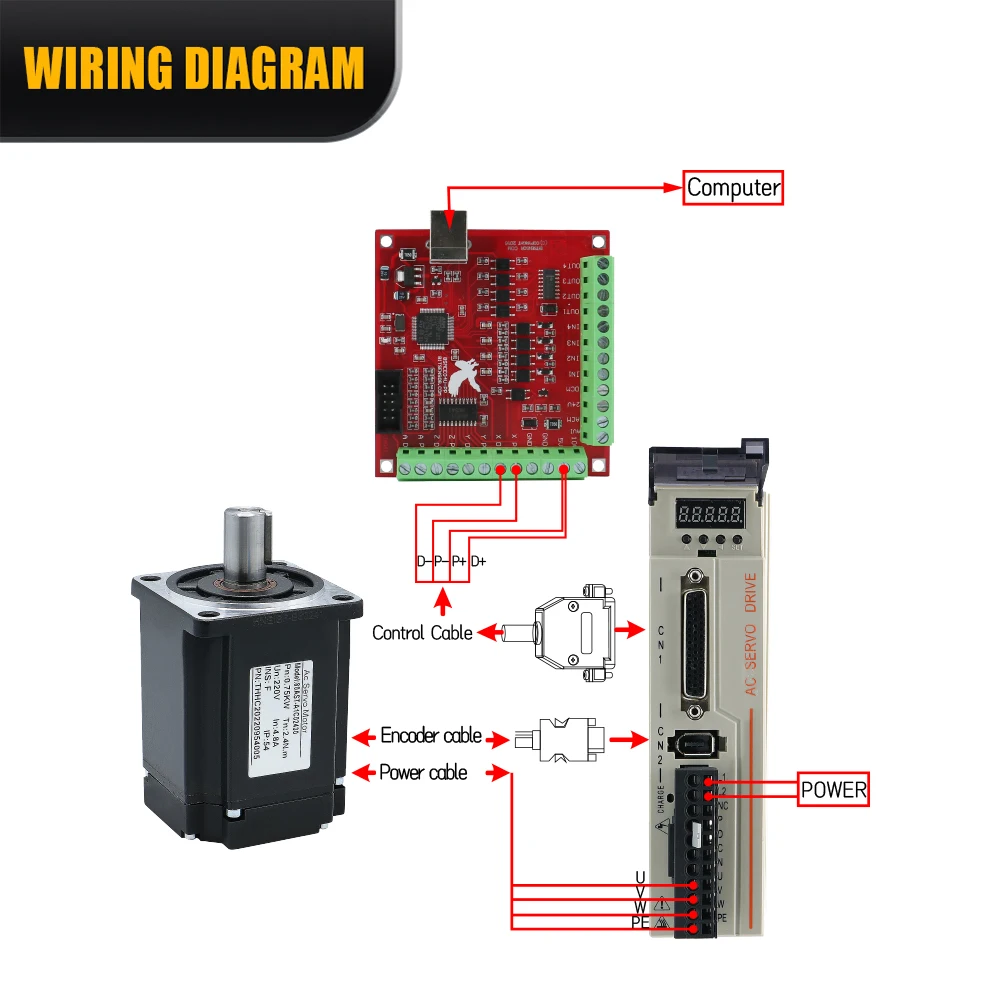
1 : Prise en charge de l'impulsion (signal d'impulsion 5 V ou 24 V), quantité analogique (0-10 V), contrôle modbus RS485
2 : Prend en charge les systèmes CNC et PLC
3 : Pour se connecter à un signal d'impulsion 24 V, deux résistances 2K 1/4 W doivent être connectées en série pour P+ et D+, sinon le pilote grillera
4 : Le moteur avec freins doit être connecté à une alimentation externe 24 V et à un relais
5 : Mise sous tension des paramètres
Changer P-036 à 1 (direction opposée) 0 (direction positive) paramètre de conversion de la direction du moteur
Changer P-098 à 1 (activation interne) 0 (activation externe)
Plus le paramètre du rapport de démultiplication électronique P-029 est grand, plus la vitesse est rapide
Appuyez longuement sur le bouton de confirmation de l'E-SEF pour afficher DONE enregistré avec succès.Après avoir défini tous les paramètres, éteignez et redémarrez.
Remarque
Si vous n'avez pas besoin de commentaires ABZ, ce servomoteur peut être plus adapté pour vous et avoir un meilleur prix.
Cliquez sur le lien pour acheter :
https://www.aliexpress.com/item/1005006888707656.html
1 * servomoteur (11 bits absolu)
1 * pilote secteur
1 câble d'encodeur de 3 mètres + câble d'alimentation
1 * câble de signal de contrôle
Résistance 2*2K 1/4W
1 * câble RS485
Spécifications techniques
Tension nominale (V)
Puissance nominale (W)
Paires de pôles de rotor ( P )
Couple nominal (Nm)
1.27
1.91
2.4
3.8
Couple maximum instantané (Nm)
3.82
5.73
7.2
11.4
Vitesse nominale/vitesse maximale (tr/min)
3000/6000
3000/5000
2500/3000
Courant nominal (A)
2.810%
410%
4.810%
Courant maximum instantané (A)
8.410%
1210%
14.410%
Coefficient de moment (Nm/A)
0.4210%
0.5410%
0.510%
0.9310%
Coefficient EMF arrière (X10 V/rpm)
27.510%
32.5%
33.210%
5610%
Résistance (Ω)
310% ( 20℃ )
3.2 10%(20 ℃)
1.6 10%(20 ℃)
310%(20℃)
Inductance (mH)
7.820% ( 20℃ )
8.420% ( 20℃)
9.520% (20℃)
1920% (20℃)
Moment d'inertie (X10V/rpm)
0.68 [0.73] 10%
0.82[1.7] 10%
1.72 [1.77] 10%
2.4[2.45]10%
Charge radiale maximale (N)
Charge axiale maximale (N)
Poids (KG)
1.22 [1.65] 10%
1.4[1.7]10%
2.2[3]10%
2.71[3.36]10%
Résolution de l'encodeur
10000ppr
Structure de protection
IP65
Classe d'isolation
Résistance d'isolation
Plus de 20 m Ω DC500V
Isolation Tension de tenue
CA 1500 V 1 minutes
Niveau de vibration
Classé A pour le fonctionnement
Se tourner autour
Commande de virage vers l'avant, visualisée depuis le côté de la charge, dans le sens inverse des aiguilles d'une montre (CCW)
Environnement
Température -20℃ ~ 40℃, humidité 20 % ~ 80 % HR (pas de condensation), altitude inférieure à 1000
Température - 20℃ ~ 60℃, (pas de gel) humidité 20 % ~ 80 % HR (pas de condensation)
Résistance aux chocs
98 m/S 2
Résistance aux vibrations
49m/S 2
Symbole
Nom
Fonction
POW
Lumière d'alimentation
(aucun)
Le point décimal du deuxième bube numérique de gauche s'allume pour indiquer que le servo est sous tension
RUN
Lumière de course
(aucun)
Le point décinal du premier tube numérique de gauche s'allume pour indiquer que le servo est activé
Ajouter une clé
Augmentez le nombre de série de la valeur, une pression longue a un effet de répétition
Diminuer la clé
Diminuez le nombre de série de la valeur, les prêtes longues ont un effet de répétition
Clé de sortie
Sortie du menu, opération annulée,
ENSEMBLE
Entrez
Entrée du menu, confirmation de modification des paramètres ou confirmation de fonctionnement
Définir après la mise sous tension :
Trouvez le P-098 et changez-le en 1
Recherchez l'E-SEF, appuyez et maintenez la touche de confirmation jusqu'à ce qu'elle affiche UNE.alors les paramètres ont été enregistrés avec succès.Une fois tous les paramètres définis, éteignez et redémarrez.
Paramètres communs :
Le P-036 est remplacé par 1 (direction inverse) 0 (direction positive) du paramètre de conversion de la direction du moteur.La valeur par défaut est 1 direction inverse
P-029 (numérateur de rapport de transmission électronique) est 1 par défaut, plus la valeur est élevée, plus la vitesse est rapide
(Les paramètres ci-dessus sont des paramètres de réglage généraux.Si vous devez modifier d'autres paramètres, veuillez vous référer au manuel ou contacter le personnel technique/vente)
Les paramètres suivants sont des paramètres de réglage rigides.Aucun réglage n'est nécessaire si l'équipement est OK
P-005 (Rigidité de l'anneau de vitesse)
P-009 (Rigidité de l'anneau de position)
P-006 (généralement, le réglage maximum est d'environ 100)
P-019 (généralement, le réglage maximum est d'environ 300)
L'ajustement spécifique des paramètres rigides dépend de la structure de transmission et de la charge de l'équipement. Contactez le personnel du service après-vente pour des questions spécifiques.
Produits similaires

Film Hydrogel 5 pièces pour Samsung …
9,48 €

Nouveau 1 jeu de KIT de …
81,87 €
Semelles intérieures en mousse à mémoire …
4,77 €

Protecteur de roues en Silicone à …
7,31 €

S/L voiture de Camping chariot pliable …
208,92 €

Oreiller de protection de tête pour …
21,67 €

Masseur de cou et de visage …
33,22 €

Machine à poupée, jeu à pièces …
9,07 €